RaySpace: measuring glyph similarity by firing rays through font outlines
No pixels. No neural networks. 250,000 confusable pairs across 245 fonts in 50 minutes.
Every confusable detection system before this project worked on pixels. Render two characters, compare the images. SSIM, perceptual hashing, neural networks: all pixel-based. The problem is not accuracy. The problem is that pixel comparison answers the wrong question.
Pixels tell you “these two images look similar.” Font vector outlines tell you “these two characters have the same geometric structure.” The distinction matters. Two characters can render to similar pixel grids at one resolution and different grids at another. The outlines do not change. The Bezier curves in the font file are the ground truth.
RaySpace compares outlines directly. No rendering step, no rasterisation, no image processing. The input is the same vector data the font engine reads when it draws text. The output is a per-font distance score that captures structural similarity at sub-glyph resolution.
This post explains how it works, what it replaced, and why it finds confusable pairs that pixel methods miss.
Why pixels failed
The first version of this pipeline used SSIM (Structural Similarity Index) on 48x48 greyscale renders. It worked. 903 confusable pairs across 74 fonts, correct verdicts on all 31 validation vectors. Then I tried to scale it.
The pipeline needed to compare 22,581 characters across 12 scripts and 245 fonts. That is 52 million cross-script comparisons per font. SSIM requires rendering both characters to pixels, normalising the images (crop, centre, resize), and running the comparison algorithm. At 48x48 resolution, each SSIM computation touches 2,304 pixels twice (once per image), runs the sliding-window SSIM kernel, and produces a score. Fast for 903 pairs. Not tractable for 52 million.
More fundamentally, SSIM underscored the pairs that matter most. Cyrillic а (U+0430) vs Latin a (U+0061), the canonical cross-script confusable, scored SSIM 0.41. These characters share identical outlines in most sans-serif fonts. SSIM scored them at 0.41 because minor rendering differences (anti-aliasing, pixel grid alignment) created structural noise that the algorithm interpreted as dissimilarity. The signed distance field (SDF) approach that replaced SSIM scored the same pair at NCC 0.95, much closer to the geometric reality.
SSIM also struggled with small features. The dot on “i”, accent marks, and diacritics shifted SSIM scores by amounts that swamped the structural signal. A character with a dot above it and the same character without the dot might score 0.85, high enough to flag as confusable. The dot is 4 pixels in a 48x48 grid. It should not dominate the comparison.
The SDF detour
The replacement was signed distance fields. For each character, compute a 128x128 grid where each cell stores the signed distance from that point to the nearest outline edge. Negative values are inside the glyph, positive outside. Compare two grids with L2 (root-mean-square difference) and NCC (normalised cross-correlation).
SDF solved the accuracy problem. Cyrillic а vs Latin a: L2 = 0.000, NCC = 1.0 in Tahoma. The outlines are identical; the metric reflects that. The cross-script discovery pipeline used SDF to find 41,680 unique confusable pairs across 245 fonts.
But SDF introduced a new bottleneck. Computing a 128x128 distance field means evaluating the distance from 16,384 grid points to every Bezier segment in the outline. A typical Latin character has 20-40 segments. A Han character can have 200+. Each distance evaluation involves finding the closest point on a quadratic or cubic Bezier curve. Not cheap. SDF was the right metric but too slow to use as a first-pass filter.
The pipeline used raycasting as a pre-filter: cast rays through outlines, count intersections, reject pairs with different topology. Then run SDF only on the survivors. This three-stage cascade (width filter, raycasting filter, SDF scoring) reduced 52 million comparisons to 449,000 SDF evaluations. The raycasting filter was doing 72% of the work.
The question became: if raycasting is already capturing structural similarity well enough to filter, can it replace SDF entirely?
The idea has a lineage
Raycasting glyphs was not an original thought. The technique draws from a surprisingly deep well of prior work across domains that all share one principle: you can characterize geometry by firing directed energy along straight lines and analysing what comes back.
Arthur Appel (1968) established the foundational insight at IBM. His paper “Some Techniques for Shading Machine Renderings of Solids” proposed casting rays from a camera through each pixel to determine visibility. A ray is just a geometric query: an origin, a direction, and the question “what does this hit?” Every ray-based technique since is a variation on Appel’s probe.
John Carmack (1992) made it fast. Wolfenstein 3D cast one ray per screen column through a 2D grid map. The distance to the first wall hit determined the wall height drawn in that column. Parallel rays through a 2D structure, intersection distances encoding shape. The paradigm maps directly onto what RaySpace does with glyph outlines. Carmack’s insight was that severe geometric constraints (grid-aligned walls, fixed height, no vertical look) reduced a 3D rendering problem to a set of 1D intersection queries against a 2D map. RaySpace applies the same trade: glyph outlines are 2D, rays are 1D, and the intersection pattern encodes enough structural information to compare shapes without ever reconstructing an image.
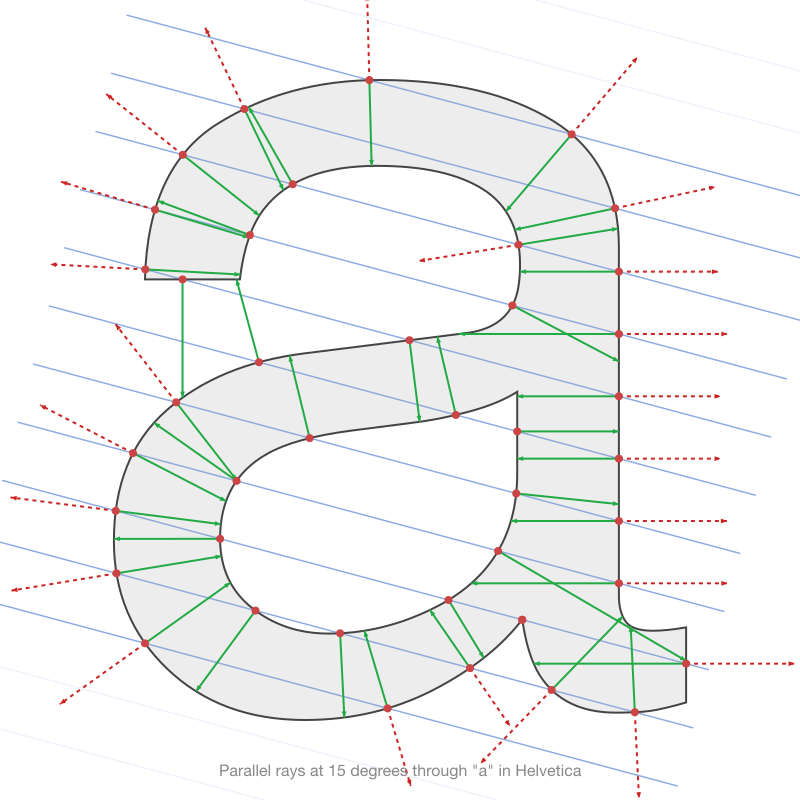
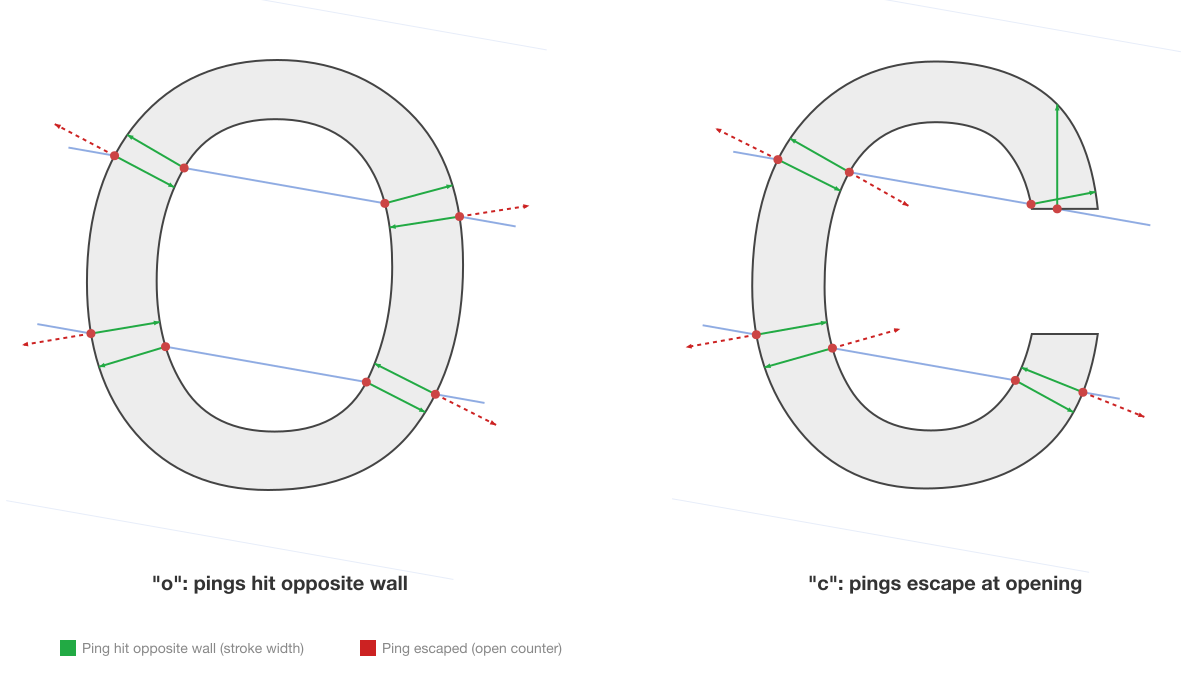
Ambient occlusion is the closest ancestor to ping rays. Formalised by Zhukov, Iones, and Kronin (1998) and brought to production by Hayden Landis at ILM (2002), AO asks “how enclosed is this surface point?” by casting rays outward from a surface into the hemisphere above it and measuring what fraction hit nearby geometry. A point deep in a crevice is heavily occluded (dark). A point on an exposed surface is not (bright). Ping rays in RaySpace ask the same question in 2D: fire a ray perpendicular to the glyph outline, into the interior, and measure how far it travels before hitting the opposite wall. Short distance means a thin stroke. Long distance means a wide counter. Escape means an opening (the difference between “c” and “o”). AO integrates over a hemisphere to produce a scalar. Ping rays sample along a contour to produce a distance vector. The principle (“cast a ray from a surface, measure how far it goes before hitting something”) is identical.
Acoustic ray tracing provides the fingerprint analogy. Krokstad, Strom, and Sorsdal (1968) fired rays from a sound source in a room, tracked reflections off walls, and collected arrival times at a receiver to build an impulse response: a compact signal that characterises the room’s geometry. A small hard-walled room produces short, dense reflections. A cathedral produces long, sparse ones. Two rooms with identical impulse responses are acoustically indistinguishable. RaySpace works the same way: the pattern of intersection distances across 36 angles is a compact signal that characterises a glyph’s geometry. Two glyphs with similar ray signatures are geometrically similar.
Sonar is the literal namesake. A sonar ping sends a pulse of sound and measures the time until it returns: distance to the nearest obstacle. The “ping ray” in RaySpace does the same thing: fire a ray perpendicular to the outline surface, measure the distance to the opposite wall.
The deepest connection is to computed tomography. Godfrey Hounsfield built the first CT scanner in 1971 (Nobel Prize, 1979). The principle: fire X-rays through the body at many angles, measure attenuation along each ray, reconstruct the internal structure from the aggregate of measurements. A CT sinogram (the raw data, organised as angle vs. detector position) is formally analogous to a RaySpace descriptor organised as angle vs. intersection pattern. RaySpace is, mathematically, a discretised binary Radon transform. Johann Radon proved in 1917 that the complete set of line integrals through a 2D function uniquely determines that function. Even a coarse discrete approximation (36 angles, 50 rays per angle) captures enough information to distinguish most shapes and identify similar ones. This is why multi-angle ray probing works for shape comparison: Radon’s theorem guarantees it.
None of this was planned from the start. The raycasting filter existed before I recognised the connections. But once the ping rays worked, once a perpendicular probe from the outline surface was measuring stroke width exactly the way ambient occlusion measures surface enclosure, the lineage became clear. The technique is new in its application (nobody has raycasted font outlines for confusable detection before), but the principles are 50 years old.
Raycasting: the core idea
Cast a line through a glyph outline. Count how many times it crosses the boundary. A vertical stroke produces 2 crossings (entry, exit). The letter “o” produces 4 crossings (outer entry, inner entry, inner exit, outer exit). The letter “c” produces 2 crossings at most angles but 0 at the angle that passes through the gap.
Do this at 36 angles (0 to 175 degrees, 5-degree steps) with 50 parallel rays per angle. Each glyph produces 1,800 intersection counts: a topological fingerprint that captures how many strokes, counters, and holes exist at every projection angle.
Two characters with the same topological structure produce similar count patterns. Latin o and Cyrillic o: identical counts at every angle. Latin “l” and Arabic alef in Tahoma: identical counts at every angle (both are single vertical strokes in that font). The count signature captures this immediately, with no rendering.
But counts alone have blind spots.
The five layers
Intersection counts were the first implementation. They worked for gross structural comparison but failed on two classes of pairs:
The dot problem. Latin “i” vs Arabic alef. The dot on “i” adds 2 extra crossings (entry + exit) at rays that pass through it, roughly 13% of all rays. Averaging across 1,800 rays dilutes this signal below any useful threshold. The count-only metric scored i/alef at 0.37, indistinguishable from genuinely similar pairs.
The open-vs-closed problem. Latin “c” vs “o”. At most angles, both produce 2 crossings (entry, exit) or 4 crossings (with counter). The difference is that “c” has an opening where rays pass through without crossing. But this only affects a narrow range of angles. Count-only scored c/o at 0.34.
The solution was not to discard counts but to add more layers of information from the same rays. Each ray already computes exact intersection points against every Bezier segment. The count-only pipeline was throwing away everything except the count. RaySpace keeps five layers:
Layer 1: Counts. How many times the ray crosses the outline. The original topological fingerprint. Stored as uint8 (0-255), capped at 10 per ray.
Layer 2: Positions. Where along the ray each crossing occurs, normalised to [0, 1] relative to the glyph bounding box and quantised to uint8. Two characters with the same count but different intersection positions (like c vs o at angles where both have 2 crossings) now produce different signatures.
Layer 3: Crossing angles. The angle between each ray and the outline tangent at the intersection point. A ray crossing a vertical stroke at 90 degrees produces a different signal than one crossing a diagonal stroke at 45 degrees. This captures stroke direction: whether the outline is curving left, right, or running straight at each intersection.
Layer 4: Ping distances. At each intersection, a secondary “ping” ray fires perpendicular to the outline tangent, into the glyph interior. The distance it travels before hitting the opposite wall measures local stroke width. A thin stroke (like the vertical of “l”) produces a short ping distance. A wide bowl (like the counter of “o”) produces a long one. Stored as uint8, 255 = ping escaped without hitting anything.
Layer 5: Ping depth. The same perpendicular ping ray, but measuring the longer of the two directions (both normals are tested). This captures counter depth: how much open space exists on the other side of the stroke. In the letter “o”, pings from the outer wall hit the inner wall (short, measuring stroke width) but pings from the inner wall in the opposite direction measure the counter depth (longer). The ratio of ping distance to ping depth distinguishes thick strokes from thin ones and solid regions from open counters.
The ping rays are what separate RaySpace from simple raycasting. Counts and positions capture topology (how many strokes, where they are). Crossing angles capture orientation (which direction strokes run). Pings capture geometry (how thick strokes are, how deep counters are). Together, these five layers describe the interior structure of a glyph at sub-stroke resolution.
Each glyph produces five uint8 arrays. Counts and positions are variable-length (positions has sum(counts) elements). Crossing angles, ping distances, and ping depth each have one element per intersection. The total signature for a typical Latin character is approximately 5,400 values.
Comparison metric
Two RaySpace signatures are compared ray by ray. For each of the 1,800 rays, one of three cases applies:
| Case | Condition | Distance |
|---|---|---|
| Both miss | countA == 0 and countB == 0 | 0 |
| Same count | countA == countB > 0 | MSE of sorted position/angle/ping values |
| Different count | countA != countB | MSE of matched positions + 1.0 per unmatched |
The 1.0 unmatched penalty is a deliberate design choice. An unmatched intersection means one glyph has a structural component (stroke, dot, accent) that the other lacks. This should dominate the distance. Without this penalty, the dot on “i” contributes a small fractional difference averaged across 1,800 rays. With it, each of the ~234 rays that pass through the dot contributes a full 1.0, a signal that cannot be diluted by averaging.
Per-ray distances within each angle are averaged to produce 36 per-angle scores. These are combined with a mean-max blend:
Mean alone fails for localised features (the dot affects 12 of 36 angles; pure mean divides the signal by 3). Max alone is too sensitive to noise. The blend preserves peak signals while keeping the overall score stable.
What it finds
True confusables: Latin o vs Cyrillic o
The ground truth test. Latin o (U+006F) and Cyrillic o (U+043E) share identical outlines in most fonts. RaySpace scores them at 0.000 in Tahoma and Arial. In Helvetica, where the outlines have sub-curve differences, the score is 0.020, still well within the confusable range.
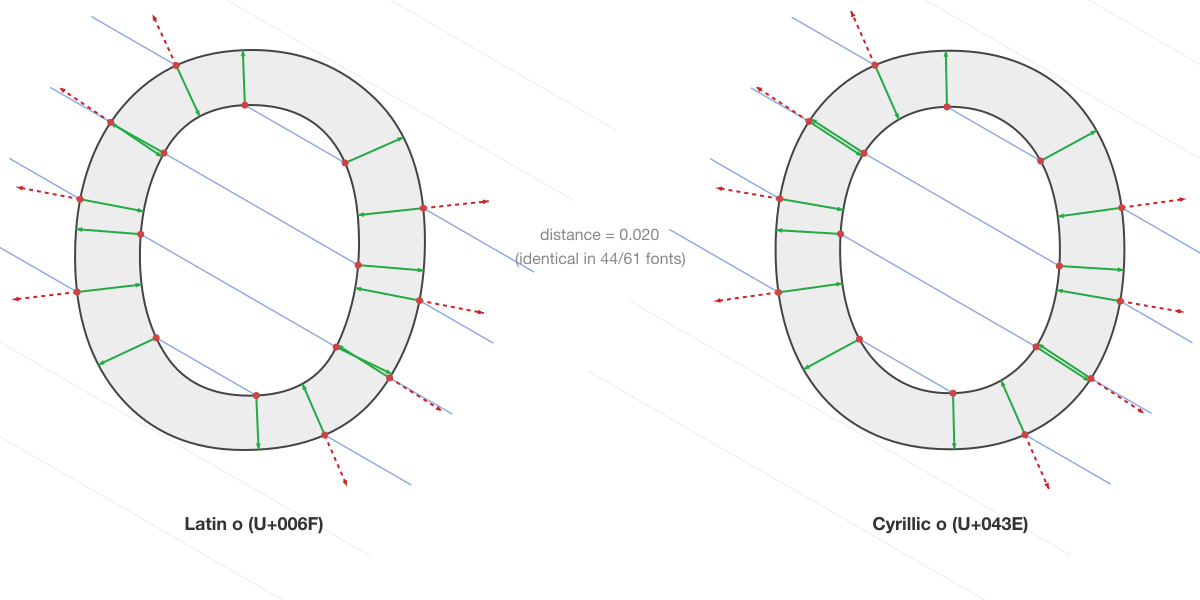
This is what a true confusable looks like in RaySpace: identical intersection patterns at every angle, identical positions, identical ping distances. The metric reflects the geometric reality that these are the same curves.
Multi-character: “rn” vs “m”
The textbook multi-character confusable. The pipeline concatenates the outlines of “r” and “n” (with font kerning applied) and compares against “m” as a single glyph. RaySpace scores this at 0.253 in InaiMathi, 0.296 in Heiti SC, 0.333 in Arial.
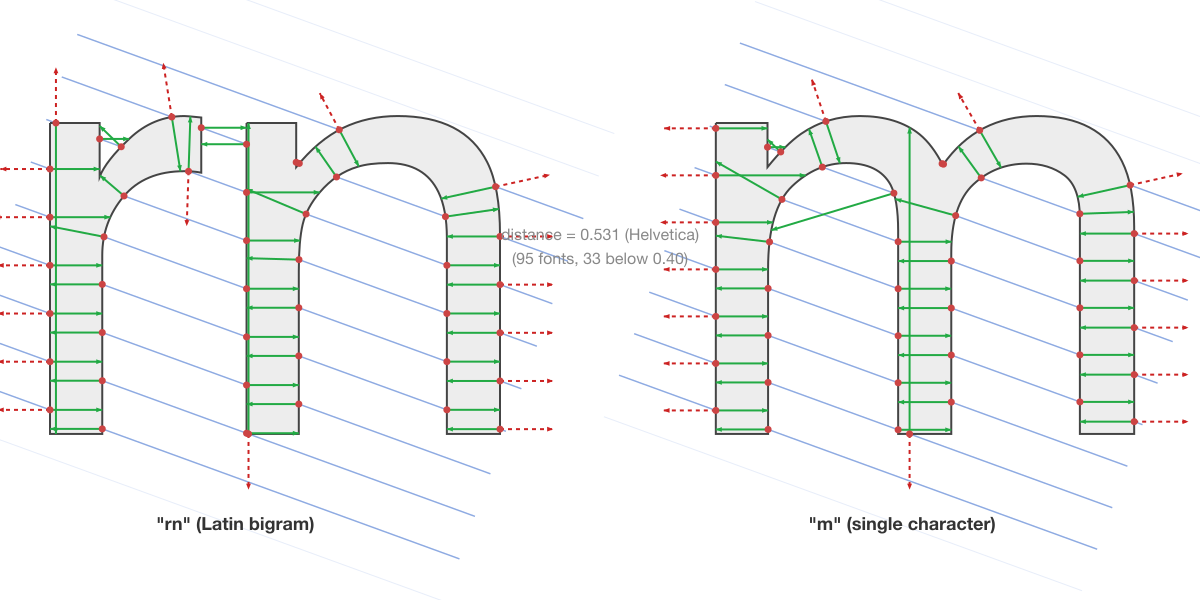
The per-font variation is the point. In sans-serif fonts with uniform stroke weight (Arial, Helvetica, System Font), “rn” and “m” are nearly identical: the arches of n align with the arches of m, and the junction between r and n is barely visible. In serif fonts (Didot at 0.910, Baskerville at 0.881) or decorative fonts (Savoye LET at 1.394), the difference is obvious. A detection system that knows the user’s font can set an appropriate threshold instead of treating all fonts the same.
The top 10 fonts for rn/m confusion:
| Font | RaySpace distance |
|---|---|
| InaiMathi | 0.253 |
| Heiti SC | 0.296 |
| Shree Devanagari 714 | 0.297 |
| Khmer Sangam MN | 0.298 |
| Arial Narrow | 0.316 |
| System Font | 0.316 |
| Arial Unicode MS | 0.317 |
| Heiti TC | 0.321 |
| Microsoft Sans Serif | 0.332 |
| Arial | 0.333 |
33 fonts score below 0.40. 65 below 0.60. 95 fonts total produce a match. These are the fonts where rn/m substitution is hardest to detect visually.
Novel discoveries
The headline novel finding: Latin “oy” is geometrically identical to Cyrillic ѹ (uk, U+0479). RaySpace distance 0.000 in Helvetica. Confirmed across 16 fonts. This is a cross-script bigram confusable: a two-character Latin sequence matching a single Cyrillic character. It was not in TR39’s confusables.txt. No detection system checked for it.
Latin “ll” matches Devanagari double danda (U+0965) at 0.176 across 8 fonts. Two vertical strokes match two vertical strokes.
Latin bigrams matching Cyrillic characters: “bl” matches Cyrillic ы (yeru) across 49 fonts. “rl” matches Cyrillic л (el) across 22 fonts. “ro” matches Cyrillic ю (yu) across 26 fonts. These are cross-script bigram confusables where a Latin two-character sequence resembles a single Cyrillic character.
The full discovery corpus: 250,000+ unique confusable pairs across 245 fonts. 571,753 multi-character pairs from the bigram pipeline alone.
Why not SDF?
SDF was good. RaySpace is better on three axes:
Speed. RaySpace computes a glyph signature in a single pass over the outline segments. SDF requires evaluating 16,384 grid points against every segment. For a character with 40 segments, SDF performs 655,360 closest-point-on-Bezier evaluations. RaySpace performs 1,800 ray-segment intersection tests (36 angles x 50 rays), each of which is a simple quadratic or cubic solve. For the multichar discovery pipeline (190 million comparisons), RaySpace completes in 63 minutes. SDF needed 91 minutes for the same search space, with raycasting doing the heavy filtering anyway.
Information density. SDF produces a 128x128 grid (16,384 values per glyph). RaySpace produces ~5,400 values per glyph with more structural resolution. SDF captures the distance field uniformly, spending equal resolution on empty space and dense stroke regions. RaySpace concentrates information at the outline boundary where the structural signal lives.
Ping rays have no SDF equivalent. SDF measures distance to the nearest edge at grid points. It does not capture the relationship between opposing edges of a stroke: the stroke width, counter depth, or whether a ping ray escapes through an opening. These are the signals that distinguish “c” from “o” and thick strokes from thin ones.
The comparison between pipelines is definitive. On the cross-script discovery task, RaySpace found 61,663 unique pairs where SDF found 41,680 (a 48% increase). On multi-character discovery, RaySpace found 2,866,184 unique pairs where SDF found 571,753 (a 401% increase). The additional pairs all passed SDF scoring when tested directly. RaySpace was not finding false positives. The count-only raycasting pre-filter had been incorrectly rejecting them, and the enriched five-layer signature corrected that.
The filter cascade
RaySpace does not eliminate the need for filtering. The full pipeline uses a two-stage cascade:
| Stage | Pairs | Remaining |
|---|---|---|
| Total search space | 52,653,594 | 100% |
| After width filter (advance width within 15%) | 38,429,753 | 73.0% |
| After RaySpace filter (threshold 2.0) | 859,475 | 1.6% |
| Discoveries | 273,344 | 0.5% |
The width filter is the cheapest check: if two characters have advance widths that differ by more than 15%, they cannot be confusable regardless of shape. This eliminates 27% of pairs with a single comparison. The RaySpace filter handles the remaining 73%, reducing to 1.6% of the original search space. No SDF step.
For multi-character discovery (676 Latin bigrams x 294,646 bank targets x 245 fonts = 190 million comparisons), the cascade is even more effective:
| Stage | Pairs | Remaining |
|---|---|---|
| Total pairs considered | 190,091,200 | 100% |
| After width filter | 69,823,708 | 36.7% |
| After RaySpace filter | 6,290,153 | 3.3% |
| Unique bigram-target pairs | 2,524,275 | - |
The width filter alone eliminates 63.3%. Most single characters have advance widths nothing like a two-character sequence. The bigrams that survive are compared using the full five-layer RaySpace signature.
The signature bank
Comparing 22,581 characters across 245 fonts means computing 294,646 RaySpace signatures (one per font/codepoint pair with glyph coverage). Rather than recompute these for every query, the pipeline pre-builds a signature bank.
The bank is a 2.55 GB gzip-compressed JSONL file. Each line contains one entry: codepoint, font name, advance width, and the five uint8 arrays (counts, positions, crossing angles, ping distances, ping depth). Loading the bank takes approximately 300 seconds and consumes ~2.1 GB of heap memory, using Uint8Array typed arrays instead of standard JavaScript number[] to fit within the 8 GB heap limit.
The bank enables O(1) lookup for any glyph comparison. The discovery pipeline loads the bank once, then compares each query signature against all relevant targets using array arithmetic. No font loading, no outline extraction, no signature computation at query time.
What this means
RaySpace makes three things possible that were not before:
Per-font confusable scoring. The distance between any two characters depends on the font. “rn” and “m” in Arial: 0.333. In Didot: 0.910. A detection system that knows the user’s font can adapt its sensitivity. This is the core capability that font-specific confusable maps are built on.
Multi-character detection at scale. Checking whether a two-character sequence matches a single character requires comparing concatenated outlines against every candidate target in the user’s font. RaySpace makes this fast enough to search 190 million combinations in an hour. The 571,753 multi-character pairs are the result.
Novel discovery. SSIM and SDF both find known confusables. RaySpace, by operating at higher structural resolution, finds pairs that pixel methods miss, like the 19,983 additional cross-script pairs that the count-only raycasting pre-filter was incorrectly rejecting.
The scored datasets feed namespace-guard for runtime confusable detection. The methodology is open source in confusable-vision.
For a detailed survey of prior work in confusable detection and shape analysis, and where RaySpace fits in that landscape, see the companion post on prior art.
How to reproduce
git clone https://github.com/paultendo/confusable-vision
cd confusable-vision
npm install
# Build signature bank (~45 min, one-time)
npx tsx scripts/build-signature-bank.ts
# Single-character cross-script discovery (~86 min)
npx tsx scripts/discover-singlechar-sdf.ts --scorer=ray
# Multi-character bigram discovery (~63 min)
npx tsx scripts/discover-multichar-sdf.ts --scorer=ray
# Output: data/output/*.jsonlRequires macOS with system fonts (245 fonts on a standard install). The pipeline is portable to other platforms with different font sets.
Series context
This is the latest post in the confusable-vision series. Previous:
- Making Unicode risk measurable (research motivation)
- Visual similarity scoring (SSIM + pHash methodology)
- Novel discoveries (903 confusable pairs)
- 148x faster pipeline (performance work)
- Cross-script validation (script family scanning)
- Font-specific maps (per-font confusable weights)
- “oy” is ѹ (571,753 multi-character confusable pairs)